| | �ӹ��������� | | ��������3.5 T/h | | Ʒ������� | |
| | �ͺ���TGN-4~6 | | �ܹ�����1.5 kw | | ���Ӽ������1��2 | |
| | �ܱ����ٶ���1 m/min | | ����ʱ����24 h | | �豸������5 t | |
һ����;���ͺű�ʾ��ʽ
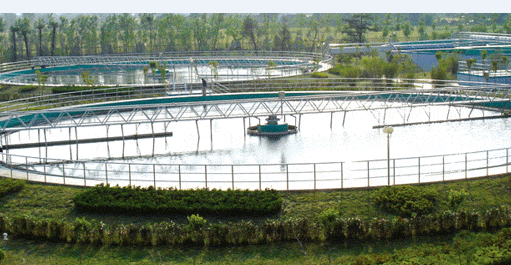
1.��;��
���豸��������ˮ������ƽ�������أ��������ڳص��ϵ�����μ�������ۣ���������ĸ���Ʋ�����ۡ�
�����ص�
TGN���г�ʽ̧�ҹ�������ݼ���ۡ���髲������ڳ����ص�ͬһ�˻�������ˣ�������Ĺ������̷ֱ����£�
1�� ����ͬ��һ�ˣ�������½���Ʋ�����½���������ɳضˣ���ˮ�ˣ�ʼ�����ࡢ������ʻ�������ࡢ�����μ�����ֱ���յ㣨��ˮ�ˣ�����������ᡢƲ�������ᣬ��������ն���ʼ�˻�����ʻ���ִ�ʼ�˺�ͣ���������һѭ����
2�� ���۷������ˣ�������½���Ʋ�������ᣬ������ɳ�ˮ��ʼ������۶���ʻ��������μ�����ֱ���յ㣬����������Ʋ�����½��������������ʻ������Ʋ��髲ۣ��ִ�ʼ�˺�ͣ���������һѭ����
�������켰����ԭ��
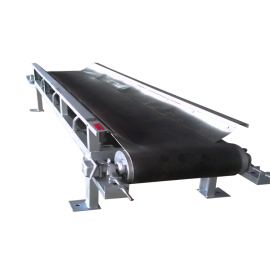
TGN���г�ʽ̧�ҹ�������г�������ҡ�Ʋ���塢����������������װ�á����ƹ����ɡ�
1�� TGN���г�ʽ̧�ҹ�������ߵ���Ϊ̼���Ƴɣ������ڳ������ϣ��ߵ��в�����1000mm�����ߵ����������з������ˣ�һ�������ݡ�
2�� TGN���г�ʽ̧�ҹ�����ڳض���Ķ����ֹ������ߣ���������װ�ã����еĹ��֡�֧��������������10�ꡣ
3��TGN���г�ʽ̧�ҹ�������������������ϵ�����װ�ô������������ڳض��ϵĹ����ʻ��������һͬ�˶��Ĺ���彫�����ڳص�����������ڼ���ۡ�
�ġ������������������
ͨ��ǰӦ������䡢����͵�ŷ��ľ�Ե����������0.5��ŷ��
�����ӵغ���ص����ӵ��Ƿ�ɿ����ӣ��͵��Ӧ��������ѹ�Ƿ�������
�����ṩ��ع�����ʽΪ��
��1���ֶ���ʽ��
a. ���ϵ�Դ�ܿ��أ�
b. ��ѡ��SA����“�ֶ�”����
c.�����������ٻ���ң�
d.�����ż����г����У����г���λ�������г����е��������ն���λʱͣ�������е������г��ն���λ�������ż�ֹͣ������
e.�����������ٻ����ң�
f.����ʱ3-10min�����żܷ��г����У����г���λ���𣬶�Ӧ���е���������ʼ�˷��г���λʱͣ�����żܷ�����ʼλ�ã����е��𣬷��г���λ������
g.���һ��ѭ����
˵�����ֶ�������Ҫ��Ϊ��װ�����ԡ��������õģ�ֹֻͣ���ֶ���Ť���ƣ��г����г����ֶ���Ť�Ŀ����⣬ͬʱҲ���г���λ����Լ����
��2�� �Զ����ƣ�
�Զ����ƹ�����ʽ�����������ȣ��г�Ӧ���ڷ��г���λ�������г���ʼ�ˡ�
a.������������ʱ��̵������������������г���ʱ���ߵ�ʱ�䣨һ��Ϊ
3-10min��Ȼ�����л���ʱʱ��̵���������������һ���������ͣ��ʱ�䡣
b.���ϵ�Դ�ܿ��غ��żܡ������ķֵ�Դ���أ�
c.��ѡ������“�Զ�”�������н����趨�����г������г̼�����
���������趨��ʱ�������Զ����У��ܶ���ʼ��ѭ�����ѡ�
˵����
1. ����PLC���Ʒ�ʽ���ڶ���ʱ��ȷ������������䱸��ֻ����������ṩ��
-
���û������Ҫ��ȷ�����Ʒ�ʽ��Ԥ���йؿ��ƽӿڵ�·��
3. �����豸���Ʒ�ʽ��������·ͼ��
�塢��װ��ʽ
1.�����
��1������ͺŷ������Ҫ��
��2�����ƫ�±5mm��
��3�������������б�Ȳ��ó���L/1500��L=���ȫ����������ȫ�г��ϵ���Ը߶��ʲ�Ϊ10mm��
��4�������ͷ��ƫ���ʲ��ϡ����Ҿ�Ϊ1mm��
2.����װ�ã�
��1����������г��ֱ���ͬʱ�Ź죬�������������洹ֱ��
��2���������������ȫ����Χ������ʱ��Ӧ�����ȡ�����ϵͳ���������������زࡢ����������������п��졢�е����쳣����
��3������������������նȡ�ǿ���㹻��������������ʱ�������������Ա��Ρ�
3.����ϵͳ��
��1���������豸Ӧ�������淶��ʹ��˵�����Ҫ����Ե����������0.5��ŷ��
��2��������DZ�����б����ӵأ��ӵص���ֵ������4��ŷ��
��3�������Ӧ�����Ҫ������Զ������������ɺ�Ӧͣ��ʼ�ˣ�
��4���������ʼ���ն�Ӧ��ʱ�ɿ�������ʱʱ��Ӧ��3-10�����ڣ������ֳ������������
��5����Դ����װ�ñ��밲ȫ�ɿ�����ȫ����Χ�ڲ������ϰ�����ڡ�
������
��1�����ٻ�Ӧ��ÿ�¼��һ���ͺ����������ʱ��ע30�Ż�е���������ߣ������ڸ������͡�
��2�����г��ֵĹ������Ӧ���ڣ�1—2�꣩��ϴ��������֬��
��3��ÿ��Ѳ�ӹ��������װ�õ����������������쳣��Ӧ����ֹͣ���У�����ԭ�������ٴ����У�
��4������ˮ�ʺʹ�����Ⱦ������ڼ�����������״̬����Ҫʱ�����������ᡣ
 ɨһɨ���ֻ����
ɨһɨ���ֻ����